pybullet_planning.interfaces.env_manager.Euler
-
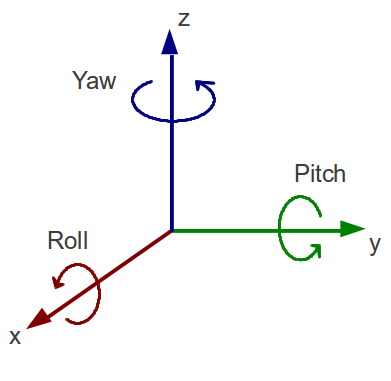
pybullet_planning.interfaces.env_manager.Euler(roll=0.0, pitch=0.0, yaw=0.0)[source] Representing a 3D rotation by Eulerian angles
- Parameters
roll (float, optional) – [description], by default 0.
pitch (float, optional) – [description], by default 0.
yaw (float, optional) – [description], by default 0.
- Returns
np array of three floats – [description]