pybullet_planning.interfaces.env_manager.create_box
-
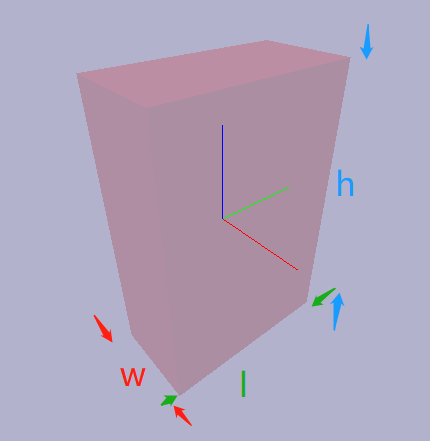
pybullet_planning.interfaces.env_manager.create_box(w, l, h, mass=0, color=(1, 0, 0, 1))[source] create a box body
- Parameters
w ([type]) – [description]
l ([type]) – [description]
h ([type]) – [description]
mass ([type], optional) – by static_mass (0) assumes the body has infinite mass and will not be affected by gravity, by default STATIC_MASS
color (tuple, optional) – [description], by default RED
- Returns
int – box body index